BOSM -5020-5Z ઓપોઝ્ડ-હેડ બોરિંગ મિલિંગ મશીન
1. સાધનોનો ઉપયોગ:
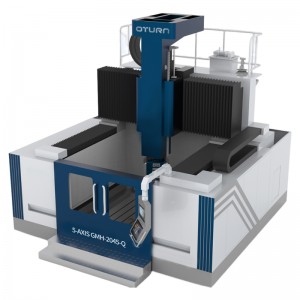
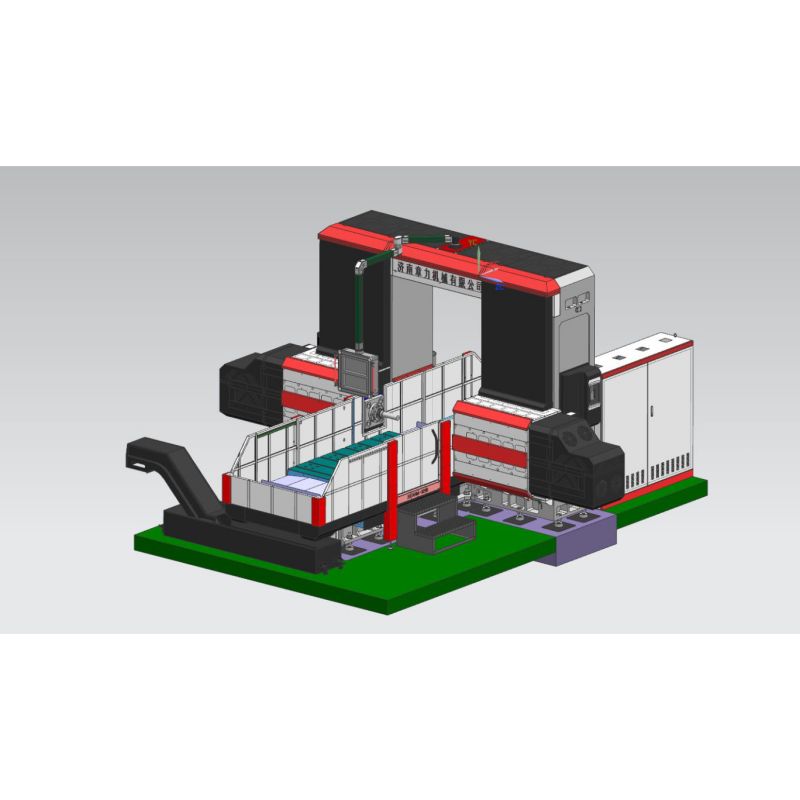
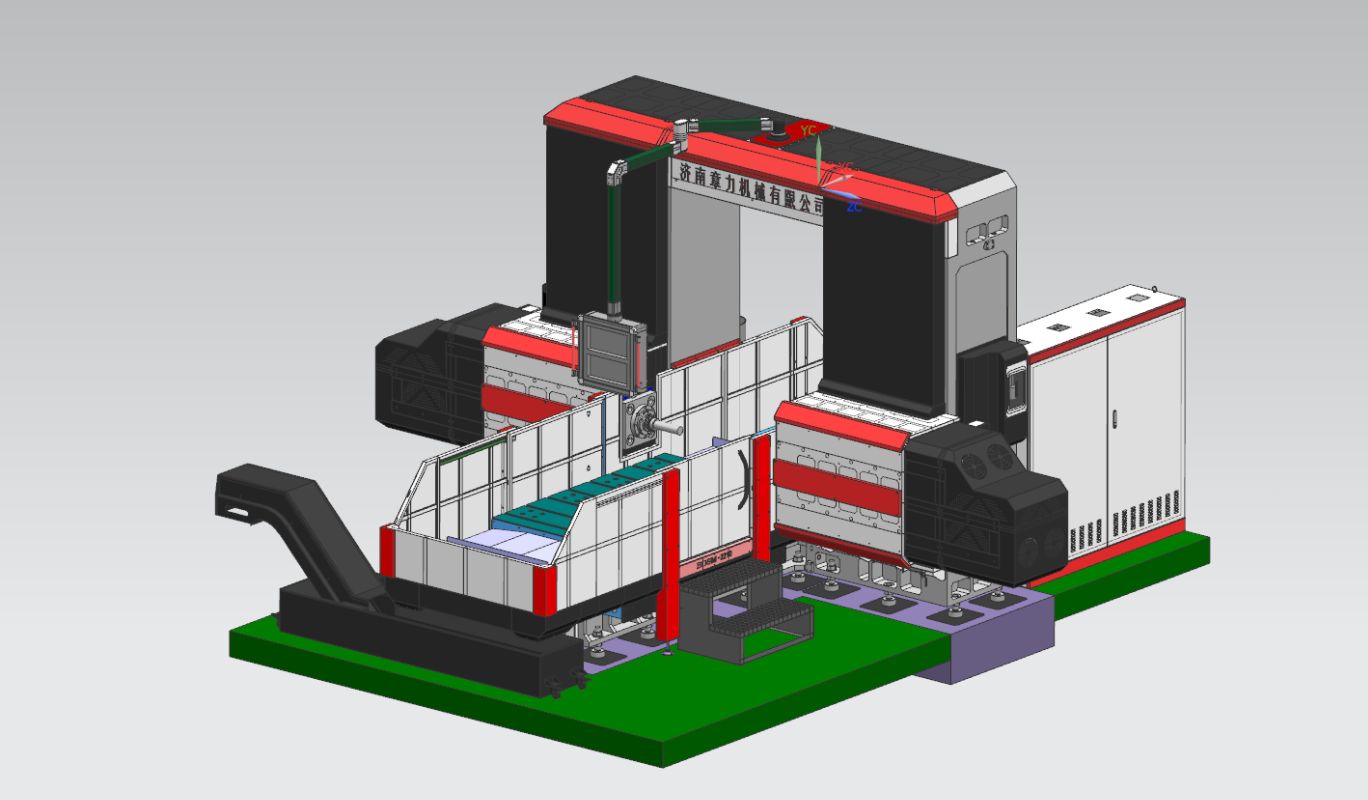
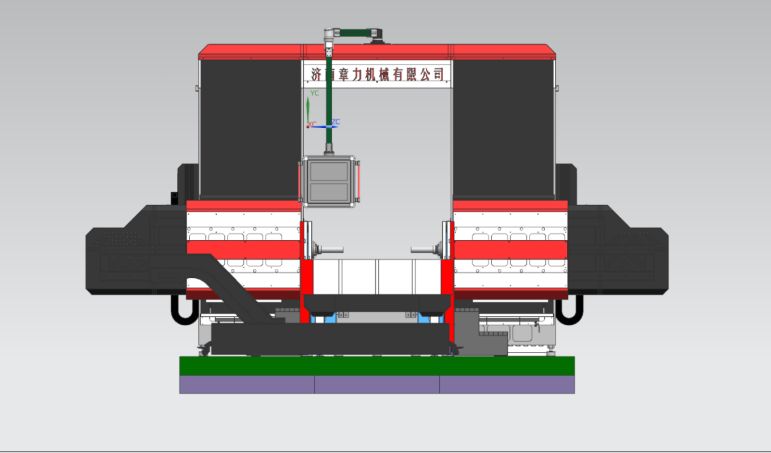
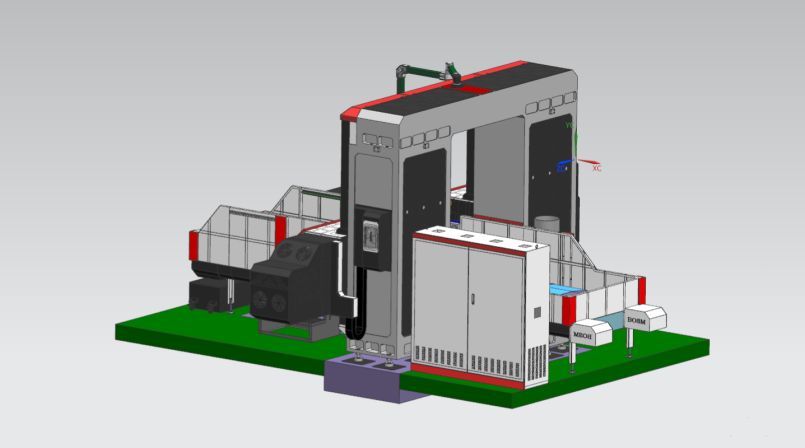
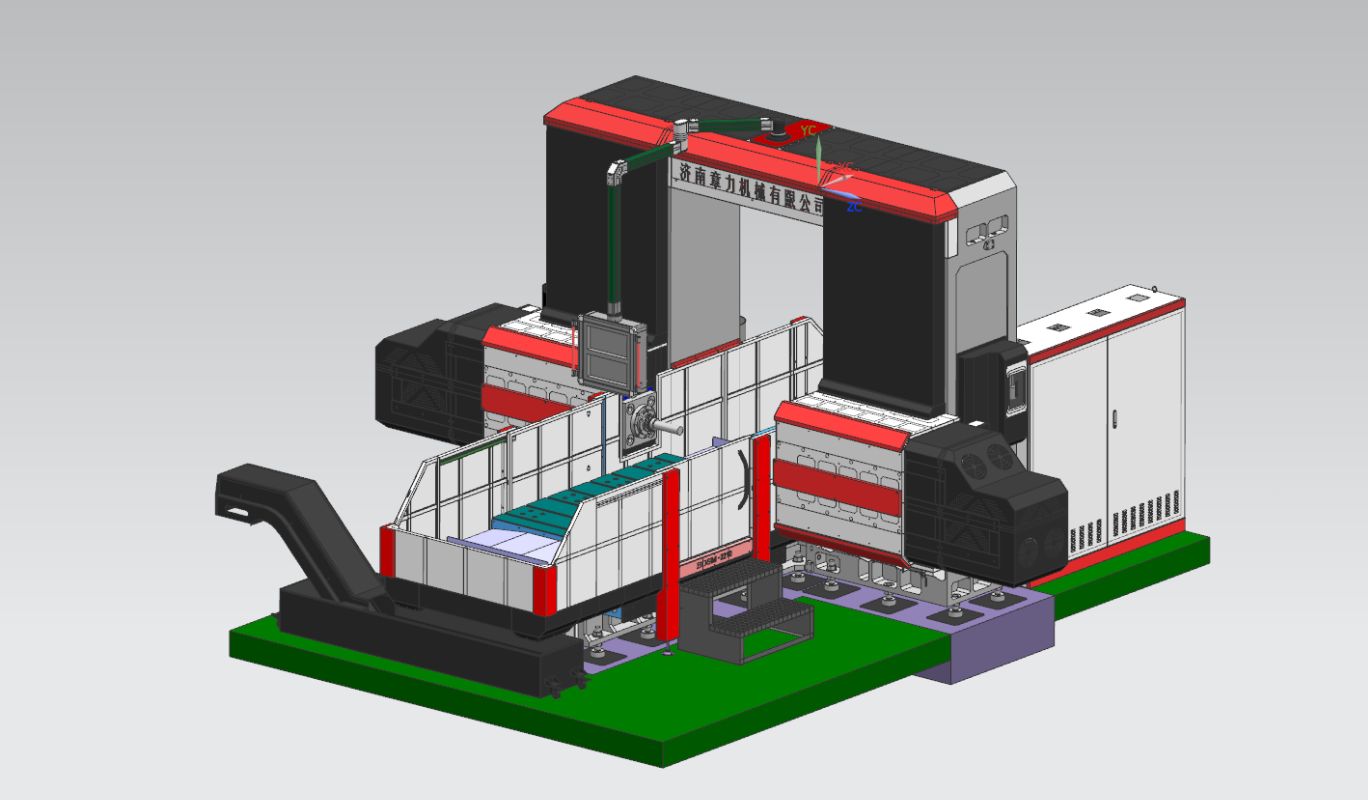
BOSM-5020-5Z CNC વર્કબેન્ચ મોબાઇલ ડબલ-કૉલમ હેડ-ટુ-હેડ બોરિંગ અને મિલિંગ મશીન એ એન્જિનિયરિંગ મશીનરી સપ્રમાણ વર્કપીસ માટે એક વિશિષ્ટ મશીન છે. મશીન ખાસ મૂવેબલ વર્કબેન્ચ અને આડા રેમના બે સેટથી સજ્જ છે, જે અસરકારક સ્ટ્રોક રેન્જમાં વર્કપીસની ડ્રિલિંગ, મિલિંગ, કંટાળાજનક અને અન્ય પ્રોસેસિંગને અનુભવી શકે છે, વર્કપીસને એક સમયે જગ્યાએ પ્રક્રિયા કરી શકાય છે (કોઈ જરૂર નથી. સેકન્ડરી ક્લેમ્પિંગ), ઝડપી લોડિંગ અને અનલોડિંગ સ્પીડ, ઝડપી પોઝિશનિંગ સ્પીડ, ઉચ્ચ પ્રોસેસિંગ ચોકસાઈ અને ઉચ્ચ પ્રોસેસિંગ કાર્યક્ષમતા.
2. સાધનોનું માળખું:
2.1. મશીનના મુખ્ય ઘટકો
બેડ, વર્કબેન્ચ, ડાબી અને જમણી બાજુના સ્તંભો, બીમ, ગેન્ટ્રી કનેક્ટિંગ બીમ, સેડલ્સ, રેમ્સ વગેરે, બધા રેઝિન સેન્ડ મોલ્ડિંગ, ઉચ્ચ-ગુણવત્તાવાળા ગ્રે આયર્ન 250 કાસ્ટિંગથી બનેલા છે, ગરમ રેતીના ખાડામાં એન્નીલ → વાઇબ્રેશન એજિંગ → ફર્નેસ એનિલિંગ → વાઇબ્રેશન એજિંગ → રફ મશીનિંગ → વાઇબ્રેશન એજિંગ → ફર્નેસ એનેલીંગ → વાઇબ્રેશન એજિંગ → ફિનિશિંગ, ભાગોના નકારાત્મક તાણને સંપૂર્ણપણે દૂર કરો અને ભાગોના પ્રદર્શનને સ્થિર રાખો. નિશ્ચિત પથારી, ડાબા અને જમણા સ્તંભો, ગેન્ટ્રી અને વર્કબેન્ચની ચાલ; મશીનમાં મિલિંગ, બોરિંગ કટિંગ, ડ્રિલિંગ, કાઉન્ટરસિંકિંગ, ટેપિંગ અને અન્ય કાર્યો છે, ટૂલ કૂલિંગ પદ્ધતિ બાહ્ય ઠંડક છે, મશીનમાં 5 ફીડ એક્સેસ છે, જે 4-એક્સિસ લિન્કેજ, 5-એક્સિસ સિંગલ-એક્શન, 2 પાવર હેડ્સને અનુભવી શકે છે , મશીન અક્ષીય અને પાવર હેડ નીચેની આકૃતિમાં બતાવેલ છે.
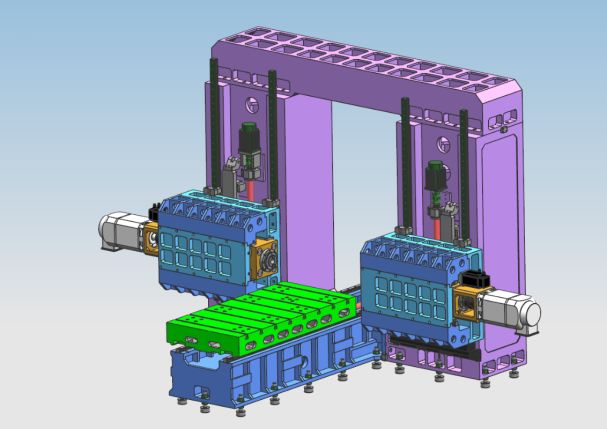
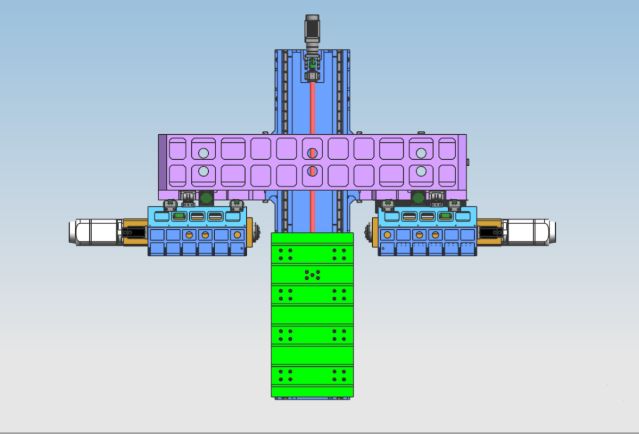
2.2. અક્ષીય ટ્રાન્સમિશન ફીડ ભાગનું મુખ્ય માળખું
2.2.1. એક્સ-અક્ષ: વર્કટેબલ નિશ્ચિત પલંગની માર્ગદર્શિકા રેલ સાથે બાજુથી પરસ્પર વળે છે.
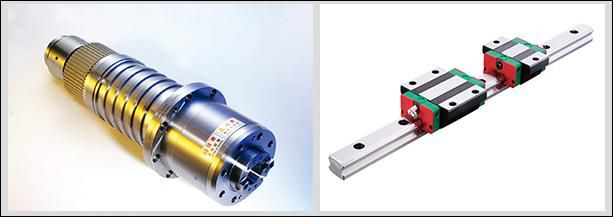
એક્સ-અક્ષ ટ્રાન્સમિશન: એસી સર્વો મોટર અને ઉચ્ચ-ચોકસાઇવાળા પ્લેનેટરી રીડ્યુસરનો ઉપયોગ વર્કટેબલને બોલ સ્ક્રુ ટ્રાન્સમિશન દ્વારા એક્સ-અક્ષ રેખીય ગતિને સમજવા માટે કરવામાં આવે છે.
માર્ગદર્શિકા રેલ સ્વરૂપ: બે ઉચ્ચ-શક્તિની ચોકસાઇવાળી રેખીય માર્ગદર્શિકા રેલ મૂકો
2.2.2.Y1 અક્ષ: પાવર હેડ અને રેમ સ્તંભની આગળની બાજુએ ઊભી રીતે ઇન્સ્ટોલ કરેલ છે, અને કૉલમની માર્ગદર્શિકા રેલ સાથે ડાબે અને જમણે પરસ્પર છે.
Y1-અક્ષ ટ્રાન્સમિશન: એસી સર્વો મોટરનો ઉપયોગ બોલ સ્ક્રુને ચલાવવા માટે કાઠીને ખસેડવા માટે અને Y1-અક્ષ રેખીય ગતિને સમજવા માટે થાય છે.
ગાઇડ રેલ ફોર્મ: 45 પ્રકારની રેખીય માર્ગદર્શિકા રેલના 4 ટુકડાઓ.
2.2.3.Y2 અક્ષ: પાવર હેડનો બીજો રેમ કૉલમની આગળની બાજુએ ઊભી રીતે ઇન્સ્ટોલ કરેલો છે, અને કૉલમની માર્ગદર્શિકા રેલ સાથે ડાબે અને જમણે વળતર આપે છે.
Y2-અક્ષ ટ્રાન્સમિશન: AC સર્વો મોટરનો ઉપયોગ Y1-અક્ષની રેખીય હિલચાલને સમજવા માટે સેડલ ચળવળને ચલાવવા માટે બોલ સ્ક્રુ ચલાવવા માટે થાય છે.
ગાઇડ રેલ ફોર્મ: 45 પ્રકારની રેખીય માર્ગદર્શિકા રેલના 4 ટુકડાઓ


2.2.4. Z1 અક્ષ: પાવર હેડ સ્લાઇડિંગ સેડલ જમણી બાજુના સ્તંભની આગળની બાજુએ ઊભી રીતે ઇન્સ્ટોલ કરેલું છે, અને કૉલમ માર્ગદર્શિકા રેલ સાથે ઉપર અને નીચે પરસ્પર વળે છે.
Z1-અક્ષ ટ્રાન્સમિશન: એસી સર્વો મોટર અને ઉચ્ચ-ચોકસાઇવાળા પ્લેનેટરી રીડ્યુસરનો ઉપયોગ રેમને Z1-અક્ષ રેખીય ગતિને સમજવા માટે બોલ સ્ક્રૂમાંથી ખસેડવા માટે કરવામાં આવે છે.
માર્ગદર્શિકા રેલ ફોર્મ: 2 65 પ્રકારની રેખીય માર્ગદર્શિકા રેલ્સ
2.2.5.Z2 અક્ષ: પાવર હેડ સ્લાઇડ સેડલ જમણી બાજુના સ્તંભની આગળની બાજુએ ઊભી રીતે ઇન્સ્ટોલ કરેલ છે, અને કૉલમ માર્ગદર્શિકા રેલની સાથે ઉપર અને નીચે વળતર આપે છે.
Z1-અક્ષ ટ્રાન્સમિશન: એસી સર્વો મોટર વત્તા ઉચ્ચ-ચોકસાઇવાળા પ્લેનેટરી રીડ્યુસરનો ઉપયોગ રેમને Z2-અક્ષની રેખીય ગતિને સમજવા માટે બોલ સ્ક્રૂ દ્વારા ખસેડવા માટે કરવામાં આવે છે.
માર્ગદર્શિકા રેલ ફોર્મ: 2 65 પ્રકારની રેખીય માર્ગદર્શિકા રેલ્સ

ઉચ્ચ ગુણવત્તાની HT250 કાસ્ટિંગ કૉલમ 65 પ્રકારની હેવી-ડ્યુટી રેખીય માર્ગદર્શિકા રેલ્સના 2 ટુકડાઓ
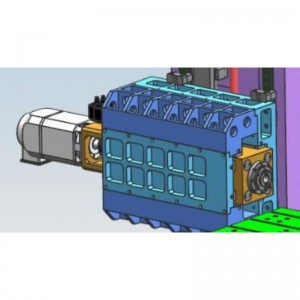
બોરિંગ અને મિલિંગ પાવર હેડ (પાવર હેડ 1 અને 2 સહિત) એક કમ્પાઉન્ડ સ્ક્વેર રેમ છે, અને મૂવિંગ ડિરેક્શન 4 રેખીય રોલર ગાઇડ રેલ્સ દ્વારા સંચાલિત થાય છે. ચોકસાઇવાળા બોલ સ્ક્રુ જોડીને ચલાવવા માટે ડ્રાઇવ એસી સર્વો મોટરનો ઉપયોગ કરે છે. મશીન નાઇટ્રોજન બેલેન્સ બારથી સજ્જ છે. , સ્ક્રુ અને સર્વો મોટર પર મશીન હેડની બેરિંગ ક્ષમતામાં ઘટાડો. Z-axis મોટરમાં ઓટોમેટિક બ્રેક ફંક્શન છે. પાવર નિષ્ફળતાના કિસ્સામાં, ઓટોમેટિક બ્રેક મોટર શાફ્ટને ચુસ્તપણે પકડી રાખશે જેથી તે ફેરવી ન શકે. કામ કરતી વખતે, જ્યારે ડ્રિલ બીટ વર્કપીસને સ્પર્શતું નથી, ત્યારે તે ઝડપથી ફીડ કરશે; જ્યારે ડ્રિલ બીટ વર્કપીસને સ્પર્શે છે, ત્યારે તે આપમેળે કાર્યકારી ફીડ પર સ્વિચ કરશે. જ્યારે ડ્રિલ બીટ વર્કપીસમાં પ્રવેશ કરે છે, ત્યારે તે આપમેળે ઝડપી રીવાઇન્ડ પર સ્વિચ કરશે; જ્યારે ડ્રિલ બીટનો અંત વર્કપીસમાંથી નીકળી જાય છે અને સેટ પોઝીશન પર પહોંચે છે, ત્યારે તે ઓટોમેટિક સર્ક્યુલેશનની અનુભૂતિ કરવા માટે આગલી હોલ પોઝિશન પર જશે. અને તે બ્લાઈન્ડ હોલ ડ્રિલિંગ, મિલિંગ, ચેમ્ફરિંગ, ચિપ બ્રેકિંગ, ઓટોમેટિક ચિપ રિમૂવલ વગેરે કાર્યોને સમજી શકે છે, જે શ્રમ ઉત્પાદકતામાં સુધારો કરે છે.


500mm સ્ટ્રોક કમ્પાઉન્ડ સ્ક્વેર રેમ પાવર હેડ સ્ક્વેર રેમની કઠોરતાને જાળવી રાખીને માર્ગદર્શક ચોકસાઈમાં ઘણો સુધારો કરવા માટે પરંપરાગત દાખલને બદલે રેખીય માર્ગદર્શિકાઓનો ઉપયોગ કરે છે.
2.3. ચિપ દૂર અને ઠંડક
વર્કબેન્ચની નીચે બંને બાજુએ સર્પાકાર અને ફ્લેટ ચેઈન ચિપ કન્વેયર્સ સ્થાપિત છે, અને ચિપ્સને સર્પાકાર અને સાંકળ પ્લેટોના બે તબક્કાઓ દ્વારા સંસ્કારી ઉત્પાદનની અનુભૂતિ કરવા માટે આપમેળે ચિપ કન્વેયર સુધી પહોંચાડી શકાય છે. ચિપ કન્વેયરની શીતક ટાંકીમાં એક કૂલિંગ પંપ છે, જેનો ઉપયોગ ટૂલના કાર્યક્ષમતા અને સેવા જીવનને સુનિશ્ચિત કરવા માટે ટૂલના બાહ્ય ઠંડક માટે કરી શકાય છે અને શીતકને રિસાયકલ કરી શકાય છે.

3. સંપૂર્ણ ડિજિટલ આંકડાકીય નિયંત્રણ સિસ્ટમ:
3.1. ચિપ બ્રેકિંગ ફંક્શન સાથે, ચિપ બ્રેકિંગ ટાઇમ અને ચિપ બ્રેકિંગ સાઇકલ મેન-મશીન ઇન્ટરફેસ પર સેટ કરી શકાય છે.
3.2. ટૂલ લિફ્ટિંગ ફંક્શનથી સજ્જ, મેન-મશીન ઇન્ટરફેસ પર ટૂલ લિફ્ટિંગ અંતર સેટ કરી શકાય છે. જ્યારે અંતર પહોંચી જાય છે, ત્યારે ટૂલ ઝડપથી ઉપાડવામાં આવે છે, પછી ચિપ્સ ફેંકી દેવામાં આવે છે, અને પછી તે ઝડપથી ડ્રિલિંગ સપાટી પર મોકલવામાં આવે છે અને આપમેળે કાર્યમાં રૂપાંતરિત થાય છે.
3.3. સેન્ટ્રલાઈઝ્ડ ઓપરેશન કંટ્રોલ બોક્સ અને હેન્ડ-હેલ્ડ યુનિટ ન્યુમેરિકલ કંટ્રોલ સિસ્ટમ અપનાવે છે અને યુએસબી ઈન્ટરફેસ અને એલસીડી લિક્વિડ ક્રિસ્ટલ ડિસ્પ્લેથી સજ્જ છે. પ્રોગ્રામિંગ, સ્ટોરેજ, ડિસ્પ્લે અને કમ્યુનિકેશનને સરળ બનાવવા માટે, ઓપરેશન ઇન્ટરફેસમાં મેન-મશીન સંવાદ, ભૂલ વળતર અને સ્વચાલિત એલાર્મ જેવા કાર્યો છે.
3.4. સાધનસામગ્રીમાં પ્રક્રિયા કરતા પહેલા છિદ્રની સ્થિતિનું પૂર્વાવલોકન અને ફરીથી નિરીક્ષણ કરવાનું કાર્ય છે, અને ઓપરેશન ખૂબ અનુકૂળ છે.
4. સ્વચાલિત લ્યુબ્રિકેશન
મશીનની ચોકસાઇ રેખીય માર્ગદર્શિકા રેલ જોડીઓ, ચોકસાઇ બોલ સ્ક્રુ જોડીઓ અને અન્ય ઉચ્ચ-ચોકસાઇવાળા ગતિ જોડીઓ આપોઆપ લ્યુબ્રિકેશન સિસ્ટમથી સજ્જ છે. ઓટોમેટિક લુબ્રિકેટિંગ પંપ પ્રેશર ઓઇલ આઉટપુટ કરે છે, અને જથ્થાત્મક લ્યુબ્રિકેટર ઓઇલ ચેમ્બર તેલમાં પ્રવેશ કરે છે. ઓઇલ ચેમ્બર તેલથી ભરાઈ ગયા પછી, જ્યારે સિસ્ટમનું દબાણ 1.4-1.75Mpa સુધી વધે છે, ત્યારે સિસ્ટમમાં દબાણ સ્વીચ બંધ થાય છે, પંપ બંધ થાય છે, અને અનલોડિંગ વાલ્વ તે જ સમયે અનલોડ થાય છે. જ્યારે રસ્તામાં તેલનું દબાણ 0.2Mpa ની નીચે જાય છે, ત્યારે જથ્થાત્મક લ્યુબ્રિકેટર લ્યુબ્રિકેટિંગ બિંદુ ભરવાનું શરૂ કરે છે અને એક તેલ ભરવાનું પૂર્ણ કરે છે. જથ્થાત્મક તેલ ઇન્જેક્ટરના સચોટ તેલ પુરવઠા અને સિસ્ટમના દબાણની તપાસને કારણે, તેલનો પુરવઠો વિશ્વસનીય છે, દરેક કાઇનેમેટિક જોડીની સપાટી પર તેલની ફિલ્મ છે તેની ખાતરી કરીને, ઘર્ષણ અને વસ્ત્રો ઘટાડે છે અને નુકસાનને અટકાવે છે. ઓવરહિટીંગને કારણે આંતરિક માળખું. , મશીનની ચોકસાઈ અને જીવનની ખાતરી કરવા માટે. સ્લાઇડિંગ ગાઇડ રેલ જોડીની તુલનામાં, આ મશીનમાં વપરાતી રોલિંગ રેખીય માર્ગદર્શિકા રેલ જોડીમાં શ્રેણીબદ્ધ ફાયદા છે:
① ગતિ સંવેદનશીલતા ઊંચી છે, રોલિંગ માર્ગદર્શિકા રેલનું ઘર્ષણ ગુણાંક નાનું છે, માત્ર 0.0025~ 0.01 છે, અને ડ્રાઇવિંગ શક્તિ ખૂબ જ ઓછી છે, જે સામાન્ય મશીનરીના માત્ર 1/10 જેટલી છે.
② ગતિશીલ અને સ્થિર ઘર્ષણ વચ્ચેનો તફાવત ખૂબ જ નાનો છે, અને ફોલો-અપ પ્રદર્શન ઉત્તમ છે, એટલે કે, ડ્રાઇવિંગ સિગ્નલ અને યાંત્રિક ક્રિયા વચ્ચેનો સમય અંતરાલ અત્યંત ટૂંકો છે, જે પ્રતિભાવ ગતિ અને સંવેદનશીલતા સુધારવા માટે અનુકૂળ છે. સંખ્યાત્મક નિયંત્રણ સિસ્ટમ.
③તે હાઇ-સ્પીડ રેખીય ગતિ માટે યોગ્ય છે, અને તેની ત્વરિત ગતિ સ્લાઇડિંગ ગાઇડ રેલ કરતા લગભગ 10 ગણી વધારે છે.
④ તે ગેપલેસ હિલચાલને અનુભવી શકે છે અને યાંત્રિક સિસ્ટમની ચળવળની કઠોરતાને સુધારી શકે છે.
⑤વ્યાવસાયિક ઉત્પાદકો દ્વારા ઉત્પાદિત, તેમાં ઉચ્ચ ચોકસાઇ, સારી વૈવિધ્યતા અને સરળ જાળવણી છે.
5.ત્રણ-અક્ષ લેસર નિરીક્ષણ:
બોસમેનના દરેક મશીનને યુનાઇટેડ કિંગડમની રેનિશા કંપનીના લેસર ઇન્ટરફેરોમીટર દ્વારા માપાંકિત કરવામાં આવે છે જેથી પિચની ભૂલ, બેકલેશ, સ્થિતિની ચોકસાઈ, પુનરાવર્તિત સ્થિતિની ચોકસાઈ, વગેરેની ગતિશીલ, સ્થિર સ્થિરતા અને પ્રક્રિયાની ચોકસાઈની ખાતરી કરવા માટે તેનું ચોક્કસ નિરીક્ષણ અને વળતર કરવામાં આવે. મશીન બૉલબાર નિરીક્ષણ દરેક મશીન સાચી વર્તુળ ચોકસાઈ અને મશીનની ભૌમિતિક ચોકસાઈને માપાંકિત કરવા માટે બ્રિટિશ રેનિશૉ કંપનીના બૉલબારનો ઉપયોગ કરે છે, અને મશીનની 3D મશિનિંગ સચોટતા અને ગોળ સચોટતાની ખાતરી કરવા માટે તે જ સમયે પરિપત્ર કાપવાના પ્રયોગો કરે છે.


6. મશીન ઉપયોગ પર્યાવરણ:
6.1. સાધનો ઉપયોગ પર્યાવરણ જરૂરિયાતો
ચોકસાઇ મશીનિંગ માટે આસપાસના તાપમાનનું સતત સ્તર જાળવવું એ આવશ્યક પરિબળ છે.
(1) ઉપલબ્ધ આસપાસના તાપમાનની આવશ્યકતાઓ -10°C થી 35°C છે, જ્યારે આસપાસનું તાપમાન 20°C હોય, ત્યારે ભેજ 40% થી 75% હોવો જોઈએ.
(2) નિર્દિષ્ટ શ્રેણીમાં મશીનની સ્થિર ચોકસાઈ રાખવા માટે, મહત્તમ આસપાસનું તાપમાન 15°C થી 25°C હોવું જરૂરી છે, અને તાપમાનનો તફાવત ±2°C/24h કરતાં વધુ ન હોવો જોઈએ.
6.2. પાવર સપ્લાય વોલ્ટેજ: 3 તબક્કાઓ, 380V, ±10% વોલ્ટેજ વધઘટની શ્રેણીમાં, પાવર સપ્લાય આવર્તન: 50HZ.
6.3. જો ઉપયોગના ક્ષેત્રમાં વોલ્ટેજ અસ્થિર હોય, તો મશીનની સામાન્ય કામગીરી સુનિશ્ચિત કરવા માટે મશીનને સ્થિર પાવર સપ્લાયથી સજ્જ કરવું જોઈએ.
6.4. મશીનમાં વિશ્વસનીય ગ્રાઉન્ડિંગ હોવું જોઈએ: ગ્રાઉન્ડિંગ વાયર કોપર વાયર છે, વાયરનો વ્યાસ 10mm² કરતાં ઓછો ન હોવો જોઈએ, અને ગ્રાઉન્ડિંગ પ્રતિકાર 4 ઓહ્મ કરતાં ઓછો હોવો જોઈએ.
6.5. સાધનસામગ્રીના સામાન્ય કાર્ય પ્રદર્શનને સુનિશ્ચિત કરવા માટે, જો હવાના સ્ત્રોતની સંકુચિત હવા હવાના સ્ત્રોતની જરૂરિયાતોને પૂર્ણ કરી શકતી નથી, તો હવાના સેવન પહેલાં હવાના સ્ત્રોત શુદ્ધિકરણ ઉપકરણ (ડિહ્યુમિડિફિકેશન, ડીગ્રેઝિંગ, ફિલ્ટરિંગ) નો સમૂહ ઉમેરવો જોઈએ. મશીનની.
6.6. સાધનસામગ્રીને સીધો સૂર્યપ્રકાશ, કંપન અને ગરમીના સ્ત્રોતો, ઉચ્ચ-આવર્તન જનરેટર, ઇલેક્ટ્રિક વેલ્ડીંગ મશીનો વગેરેથી દૂર રાખો, જેથી મશીનના ઉત્પાદનમાં નિષ્ફળતા અથવા મશીનની ચોકસાઈની ખોટ ટાળી શકાય.
7.તકનીકી પરિમાણો:
| મોડલ | 5020-5Z | |
| મહત્તમ પ્રોસેસિંગ વર્કપીસનું કદ | લંબાઈ × પહોળાઈ × ઊંચાઈ (mm) | 5000×2000×2500 |
| ગેન્ટ્રી મહત્તમ ફીડ | પહોળાઈ (mm) | 2300 |
| વર્કિંગ ડેસ્કનું કદ | લંબાઈ X પહોળાઈ (mm) | 5000*2000 |
| ટેબલ મુસાફરી | વર્કબેન્ચ આગળ અને પાછળ ખસે છે (mm) | 5000 |
| ડબલ રેમ લિફ્ટ ઉપર અને નીચે | રેમનો અપ અને ડાઉન સ્ટ્રોક (એમએમ) | 2500 |
| આડું રેમ પ્રકાર ડ્રિલિંગ હેડ પાવર હેડ એક બે | જથ્થો (2) | 2 |
| આડું રેમ પ્રકાર ડ્રિલિંગ હેડ પાવર હેડ એક બે | સ્પિન્ડલ ટેપર | BT50 |
| સ્પિન્ડલ ઝડપ (r/min) | 30~5000 | |
| સર્વો સ્પિન્ડલ મોટર પાવર (kw) | 37*2 | |
| બે સ્પિન્ડલના નાકના છેડાના કેન્દ્રો વચ્ચેનું અંતર (mm) | 1500-2500 મીમી | |
| સિંગલ રેમનો ડાબો અને જમણો સ્ટ્રોક (એમએમ) | 500 | |
| ડબલ રેમનો ડાબો અને જમણો સ્ટ્રોક (mm) | 1000 | |
| બાયડાયરેક્શનલ પોઝિશનિંગ ચોકસાઈ | 300mm*300mm | ±0.025 |
| દ્વિ-દિશાત્મક પુનરાવર્તન સ્થિતિ ચોકસાઈ | 300mm*300mm | ±0.02 |
| કુલ વજન (ટી) | (લગભગ) 55 | કુલ વજન (ટી) |