






વિવિધ ઉપયોગો માટે ચાઇના વાલ્વ ભાગો માટે સારી વપરાશકર્તા પ્રતિષ્ઠા

અમારી કંપની વિવિધ ઉપયોગો માટે ચાઇના વાલ્વ ભાગો માટે સારી વપરાશકર્તા પ્રતિષ્ઠા માટે "ગુણવત્તા એ ચોક્કસપણે વ્યવસાયનું જીવન છે, અને સ્થિતિ એ તેનો આત્મા હોઈ શકે છે" ના મૂળભૂત સિદ્ધાંતને વળગી રહે છે, અમે અમારા ઉત્પાદન એકમને ચોક્કસપણે તપાસવા માટે તમારું સ્વાગત કરીએ છીએ. લાંબા ગાળે નજીકમાં તમારા ઘર અને વિદેશમાં ગ્રાહકો સાથે સ્વાગત વ્યવસાય સંબંધો બનાવવા માટે આગળ જુઓ.
અમારી કંપની "ગુણવત્તા એ ચોક્કસપણે વ્યવસાયનું જીવન છે, અને સ્થિતિ તેનો આત્મા હોઈ શકે છે" ના મૂળભૂત સિદ્ધાંતને વળગી રહે છે.કાસ્ટિંગ વાલ્વ બોડી, ચાઇના વાલ્વ, હવે અમારી પાસે આ ઉદ્યોગમાં 8 વર્ષથી વધુનો અનુભવ છે અને અમારી પાસે આ ક્ષેત્રમાં સારી પ્રતિષ્ઠા છે. અમારા ઉત્પાદનોએ વિશ્વભરના ગ્રાહકો તરફથી પ્રશંસા મેળવી છે. અમારો ઉદ્દેશ્ય ગ્રાહકોને તેમના લક્ષ્યોને સાકાર કરવામાં મદદ કરવાનો છે. અમે આ જીત-જીતની પરિસ્થિતિને હાંસલ કરવા માટે ખૂબ જ પ્રયત્નો કરી રહ્યા છીએ અને અમારી સાથે જોડાવા માટે તમારું હાર્દિક સ્વાગત છે.
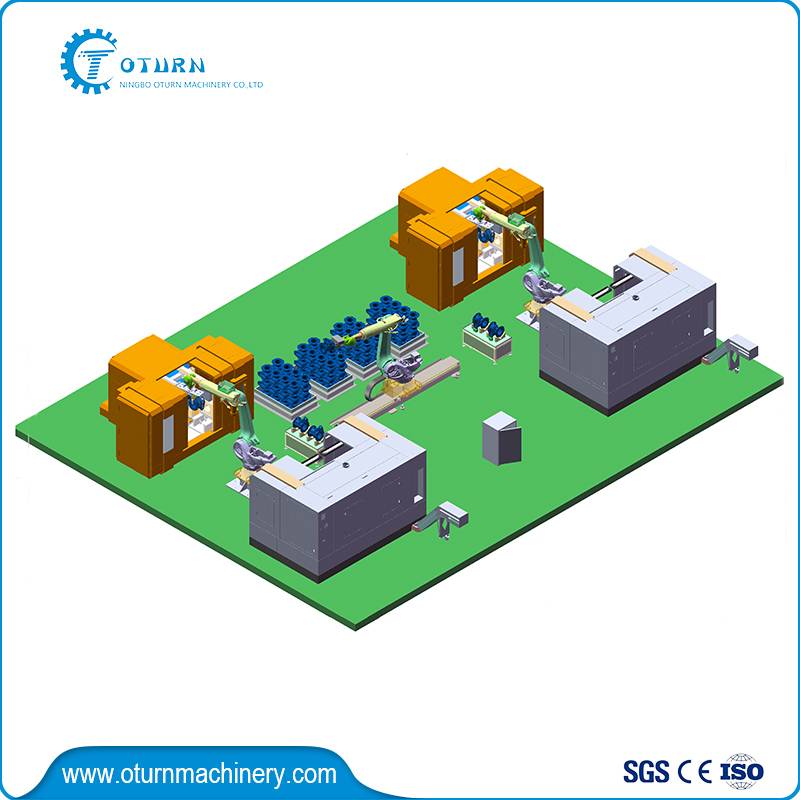
1.ઓપરેટર પોઝિશનિંગ માટે લોડિંગ પોઝિશનિંગ સ્લોટ 1 અને લોડિંગ પોઝિશનિંગ સ્લોટ 2 માં વાલ્વ બોડી વર્કપીસથી ભરેલું પેલેટ મૂકે છે, અને પોઝિશનિંગ માટે લોડિંગ પોઝિશનિંગ સ્લોટ 1 અને અનલોડિંગ પોઝિશનિંગ સ્લોટ 2 માં ખાલી ટ્રે મૂકે છે.
2. રોબોટ 1 પરનો કેમેરો વર્કપીસને સચોટ રીતે સ્થિત કરવા માટે ફીડિંગ પોઝિશનિંગ સ્લોટ 1 માં પેલેટ પરના વર્કપીસને સ્કેન કરે છે, અને વર્કપીસ 1 ને ક્લેમ્પ કરવામાં આવે છે અને બફર ટેબલ 1 પર સ્થિત પોઝિશનિંગ ફિક્સ્ચરમાં મૂકવામાં આવે છે.
તે જ સમયે, તે પ્રોસેસ્ડ વર્કપીસ 3 (રોબોટ 2 એ હમણાં જ તેને મશીન ટૂલ 2 થી પકડ્યો છે) ને પકડે છે, અનલોડિંગ પોઝિશનિંગ સ્લોટ 1 પર ખસે છે અને તેને જરૂરિયાત મુજબ પેલેટમાં સરસ રીતે મૂકે છે.
રોબોટ 1 પરનો કેમેરો વર્કપીસને સચોટ રીતે સ્થિત કરવા માટે ફીડિંગ પોઝિશનિંગ સ્લોટ 2 માં પેલેટ પરની વર્કપીસને સ્કેન કરે છે, અને વર્કપીસ 4ને ક્લેમ્પ કરવામાં આવે છે અને બફર ટેબલ 2 પરના પોઝિશનિંગ ફિક્સ્ચરમાં મૂકવામાં આવે છે.
તે જ સમયે, તે પ્રોસેસ્ડ વર્કપીસ 6 (રોબોટ 3 એ હમણાં જ તેને મશીન ટૂલ 4 માંથી પકડ્યો છે) પકડે છે, અનલોડિંગ પોઝિશનિંગ સ્લોટ 2 પર ખસે છે અને તેને જરૂરિયાત મુજબ પેલેટમાં સરસ રીતે મૂકે છે.
3. રોબોટ 2 બફર ટેબલ 1 થી વર્કપીસ 1 ને ક્લેમ્પ કરે છે અને મશીન ટૂલ 1 પર ચાલે છે, ફિનિશ્ડ વર્કપીસ 2 ને પકડે છે અને વર્કપીસ 1 ને ક્લેમ્પ કરે છે, મશીન ટૂલ 2 પર ચાલે છે, ફિનિશ્ડ વર્કપીસ 3 ને પકડે છે અને વર્કપીસ 2 ને ક્લેમ્પ કરે છે. , અને બફર ટેબલ પર ચાલે છે 1. વર્કપીસ મૂકો 3. રોબોટ 2 ચક્ર પૂર્ણ કરે છે.
4. રોબોટ 3 બફરિંગ ટેબલ 2 માંથી વર્કપીસ 4 ને પકડે છે અને મશીન ટૂલ 3 પર ચાલે છે, ફિનિશ્ડ વર્કપીસ 5 પકડે છે અને વર્કપીસ 4 ને ક્લેમ્પ કરે છે, મશીન ટૂલ 4 પર ચાલે છે, ફિનિશ્ડ વર્કપીસ 6 ને પકડે છે અને વર્કપીસ 5 ને ક્લેમ્પ કરે છે. , અને બફર ટેબલ પર ચાલે છે 2. વર્કપીસ મૂકો 6. રોબોટ 3 ચક્ર પૂર્ણ કરે છે.




અમારી કંપની વિવિધ ઉપયોગો માટે ચાઇના વાલ્વ ભાગો માટે સારી વપરાશકર્તા પ્રતિષ્ઠા માટે "ગુણવત્તા એ ચોક્કસપણે વ્યવસાયનું જીવન છે, અને સ્થિતિ એ તેનો આત્મા હોઈ શકે છે" ના મૂળભૂત સિદ્ધાંતને વળગી રહે છે, અમે અમારા ઉત્પાદન એકમને ચોક્કસપણે તપાસવા માટે તમારું સ્વાગત કરીએ છીએ. લાંબા ગાળે નજીકમાં તમારા ઘર અને વિદેશમાં ગ્રાહકો સાથે સ્વાગત વ્યવસાય સંબંધો બનાવવા માટે આગળ જુઓ.
ચાઇના વાલ્વ, કાસ્ટિંગ વાલ્વ બોડી માટે સારી વપરાશકર્તા પ્રતિષ્ઠા, હવે અમારી પાસે આ ઉદ્યોગમાં 8 વર્ષથી વધુનો અનુભવ છે અને આ ક્ષેત્રમાં સારી પ્રતિષ્ઠા છે. અમારા ઉત્પાદનોએ વિશ્વભરના ગ્રાહકો તરફથી પ્રશંસા મેળવી છે. અમારો ઉદ્દેશ્ય ગ્રાહકોને તેમના લક્ષ્યોને સાકાર કરવામાં મદદ કરવાનો છે. અમે આ જીત-જીતની પરિસ્થિતિને હાંસલ કરવા માટે ખૂબ જ પ્રયત્નો કરી રહ્યા છીએ અને અમારી સાથે જોડાવા માટે તમારું હાર્દિક સ્વાગત છે.



